Is 200K Context Enough for Anybody?
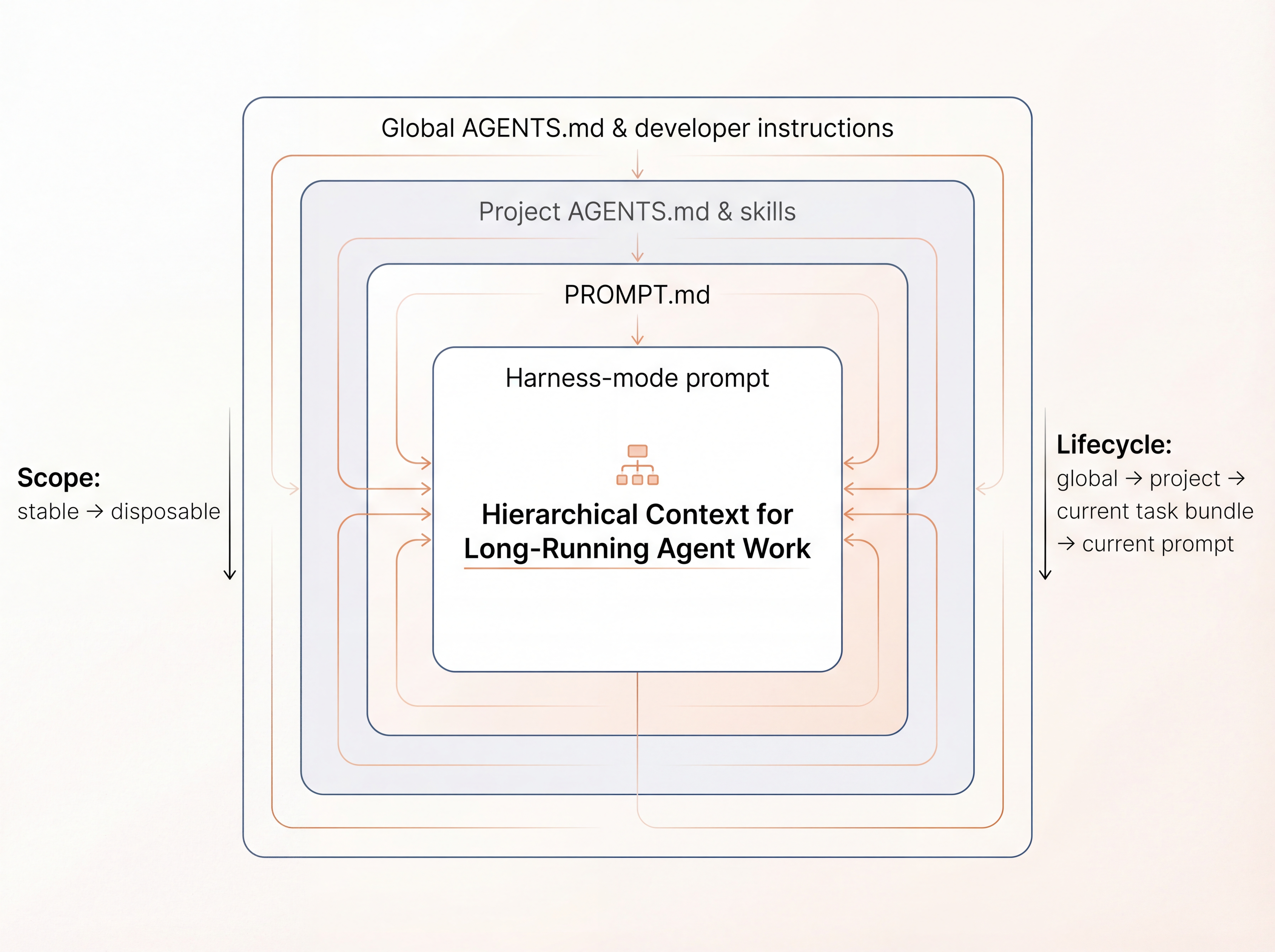
A four-layer context hierarchy for coding agents: durable method, project-local truth, the current task bundle, and unattended execution policy.
I work on autonomous systems that learn to act without being explicitly programmed. I started with the mathematics of adaptive control: how to safely operate systems you don't fully understand. That led me to dexterous manipulation, capturing how humans use their hands and turning that into robot behavior. I also built infrastructure and models for agents that learn from real experience. Now I'm bringing those threads together in foundation models for dexterous manipulation.

We used MinT to post-train Macaron-v1-preview, a 749B Mixture-of-LoRA agent model. The goal is personal-agent behavior that survives the messiness of real life: long conversations, tool use, generative UI, and tasks that change while the user and world change.

I helped build Eko, a framework for AI agents that work across browser and desktop. Most frameworks target one or the other; Eko handles both. Designed for real deployment: you can pause, inspect, and resume agents mid-task.

At DexRobot, my team built DexCanvas: 70 hours of human hand demonstrations expanded to 7,000 hours through physics-validated simulation. Unlike vision-only datasets, we capture contact forces, which is essential for learning manipulation that actually works.

My PhD asked: how do you control a system you don't understand, safely, while learning? I developed controllers with a "circuit breaker" that guarantees safety and learns efficiently. Validated on real hardware, not just simulations.
A four-layer context hierarchy for coding agents: durable method, project-local truth, the current task bundle, and unattended execution policy.